Revue TELECOM 193 - AntBot, un robot fourmi qui navigue sans GPS
ANTBOT, UN ROBOT FOURMI QUI NAVIGUE SANS GPS
Par Julien Dupeyroux, Stéphane Viollet et Julien Serres dans la revue TELECOM n° 193
La navigation autonome constitue l’un des enjeux majeurs de notre époque. Il est donc impératif d’augmenter la précision et la fiabilité des systèmes de navigation. En s’inspirant des modalités sensorielles des fourmis du désert, il est possible de concevoir de nouvelles stratégies innovantes. Ainsi, en observant le ciel, le robot AntBot est capable de s’orienter et de revenir à sa base avec une précision 100 fois meilleure que celle du GPS civil.
La navigation autonome, quelles options ?
La géolocalisation par satellite permet de déterminer la position des véhicules, mais sa précision dans le domaine civil stagne à 5 m dans des conditions optimales. A l’aube de la navigation autonome pour les véhicules en tout genre, les automobiles, les drones et autres robots, l’amélioration de la précision de la localisation requiert le développement de nouvelles solutions.
Les stratégies actuelles recourent à la fusion de données issues de nombreux capteurs, incluant le GPS, les centrales inertielles (accéléromètre, gyroscope, et magnétomètre), et les caméras embarquées.
Chaque solution technologique comporte des avantages et des inconvénients en fonction des conditions environnementales. La précision du GPS se dégrade rapidement avec la couverture nuageuse et les interférences en milieu urbain. Les centrales inertielles dérivent au cours du temps. Enfin, les caméras offrent une excellente perception de l’environnement ; toutefois, ces performances s’obtiennent au prix d’un important besoin en ressources calculatoires. De plus, la navigation visuelle peut facilement être mise en défaut, notamment en cas de forte variation de luminosité.
Il est techniquement possible de parvenir à une bonne géolocalisation en fusionnant toutes ces données, mais cela n’est pas suffisant d’une part pour assurer la sécurité des utilitaires du véhicule, et d’autre part pour permettre la navigation autonome de drones et autres robots, par exemple dans le cadre de la livraison au dernier kilomètre pour positionner le robot livreur au pas de votre porte.
Quand la Nature fait mieux que l’Homme
Retrouver son chemin est vital dans le règne animal : les oiseaux migrateurs doivent retrouver leur nid pour assurer leur survie, les saumons remontent leurs rivières natales pour se reproduire et perpétuer l’espèce, et les papillons monarques observent une migration vers le Mexique depuis l’Amérique du Nord sur plusieurs générations.
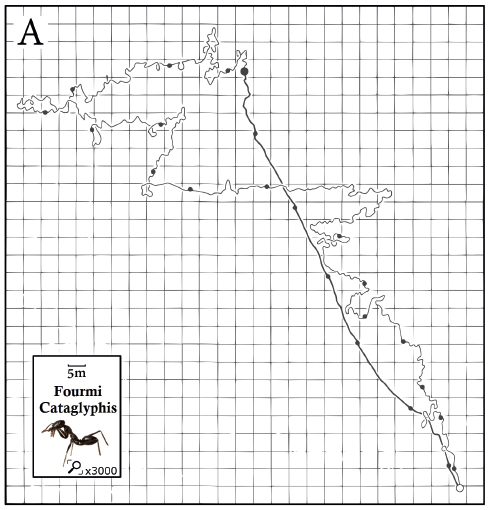
Les championnes de la navigation sont sans conteste les fourmis du désert Cataglyphis, que l’on retrouve principalement dans le Sahara. Elles sont capables de parcourir jusqu’à 1 km à la recherche de nourriture, puis de rentrer au nid en moins de 30 minutes sur un sol pouvant atteindre plus de 50°C.
 La fourmi Cataglyphis.
La fourmi Cataglyphis.
© Crédits Estella Ortega/AntWeb.org CC-BY-SA-3.0Dans ces conditions, il lui est impossible d’utiliser les phéromones pour retrouver son chemin. Elle utilise donc des informations visuelles et un podomètre pour se repérer par rapport au nid. Elle détermine la distance qu’elle a parcouru en comptant ses foulées, ainsi que sur l’intégration du défilement visuel du sol. Elle doit également déterminer son cap, qu’elle estime avec sa vision du ciel en lumière ultraviolette polarisée.
En interagissant avec les molécules de l’atmosphère, la lumière est polarisée selon un motif symétrique et relativement stable : c’est la diffusion de Rayleigh. Au cours de l’évolution, nombre d’insectes sont devenus sensibles à la polarisation de la lumière pour s’orienter. Cette véritable « boussole céleste » que l’on retrouve chez Cataglyphis fonctionne comme une boussole magnétique, mais la référence n’est plus le nord magnétique mais le motif de polarisation dessiné par le soleil.
AntBot, le robot fourmi
Doté de six pattes et de capteurs visuels mimant l’œil des fourmis du désert, le robot AntBot a été développé par l’équipe Biorobotique de l’Institut des Sciences du Mouvement (ISM – CNRS/AMU). Ce robot mime les fourmis à trois niveaux différents : morphologique, perceptif, et navigationnel. (cf figure ci-dessous)
Pour comparer les performances du robot avec celles de l’insecte, AntBot possède six pattes articulées à la façon des fourmis. Il est également doté d’un système de locomotion tripode inspiré d’observations faites chez ces insectes, lui permettant à terme de le faire évoluer sur des sols accidentés ou en pente.
AntBot possède deux capteurs bio-inspirés. Le premier est une boussole céleste constituée de deux pixels sensibles au rayonnement ultraviolet et surmontées de filtres polarisants. En faisant tourner ces filtres, il est possible de scanner la voûte céleste et de déterminer le cap du robot. Le second capteur est une rétine artificielle composée de 12 pixels qui s’adaptent aux changements de luminosité. Cette petite rétine permet de mesurer le défilement optique du sol, donnant ainsi une estimation fiable de la distance parcourue. (cf figure page suivante, en haut)
Le système de navigation d’AntBot est directement inspiré de celui des fourmis Cataglyphis : la distance est déterminée sur la base du comptage de pas et de l’odométrie visuelle, et le cap est estimé à l’aide de la boussole céleste. Testé sous diverses conditions météorologiques, ce système a permis de révéler une erreur d’à peine 7 cm, soit une valeur presque 100 fois plus faible que celle du GPS.
Les avantages de ce nouveau système de localisation sont nombreux. En particulier, il a montré une forte résilience aux conditions météorologiques. D’autre part, le nombre de pixels utilisés est extrêmement faible, pour un coût calculatoire ridicule. Des résultats préliminaires suggèrent également son utilisation par temps de pluie. A terme, ce mode de navigation pourrait être intégré aux véhicules autonomes, aux robots, mais aussi aux trottinettes électriques, et ainsi contribuer de manière significative à l’amélioration des systèmes de localisation (cf figure page suivante en bas).
 e robot AntBot. © Crédits Julien Dupeyroux - ISM (AMU/CNRS)
e robot AntBot. © Crédits Julien Dupeyroux - ISM (AMU/CNRS)
D’après Ref ou Dupeyroux et al. (2019) Science Robotics, 4, vol. 27, eaau0307.
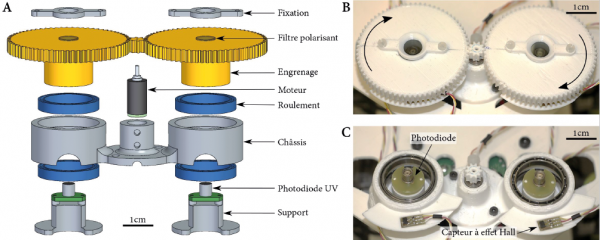 Cette figure donne les caractéristiques techniques de la boussole céleste inspirée de l'oeil composé des fourmis du désert.
Cette figure donne les caractéristiques techniques de la boussole céleste inspirée de l'oeil composé des fourmis du désert.
D’après Ref ou Dupeyroux et al. (2019) Science Robotics, 4, vol. 27, eaau0307.
 J. Duperyoux, J. Serres and S. Viollet (2019),
J. Duperyoux, J. Serres and S. Viollet (2019),
AntBot : A six-legged walking robot able to home like desert ants in outdoor environments, Science Robotics, 4, vol. 27, eaau0307
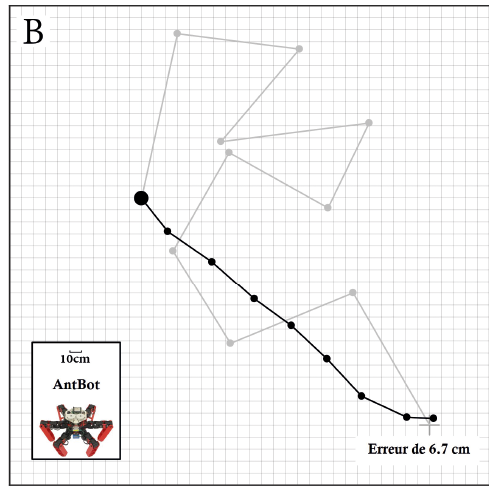 Cette figure montre une expérience de navigation réalisée avec le robot AntBot sans GPS et comparée à l'insecte. D’après Ref ou Dupeyroux et al. (2019) Science Robotics, 4, vol. 27, eaau0307.
Cette figure montre une expérience de navigation réalisée avec le robot AntBot sans GPS et comparée à l'insecte. D’après Ref ou Dupeyroux et al. (2019) Science Robotics, 4, vol. 27, eaau0307.
À retenir • Le robot AntBot s’inspire des fourmis du désert pour naviguer de manière autonome en extérieur sans GPS. • Pour s’orienter, il se réfère à l’angle de polarisation de la lumière ultraviolette de la voûte céleste. • Son système de navigation permet d’aboutir à une erreur de positionnement centimétrique 100 fois inférieure à celle du GPS. |
Biographie des auteurs
 Julien Dupeyroux est titulaire d’un diplôme d’ingénieur ENSEA en Electronique et Informatique, ainsi que d’un master recherche de l’UCP en Intelligence Artificielle et Robotique Bio-Inspirée. Il est doctorant à l’Institut des Sciences du Mouvement (AMU/CNRS) et travaille sur la navigation autonome inspirée des insectes.
Julien Dupeyroux est titulaire d’un diplôme d’ingénieur ENSEA en Electronique et Informatique, ainsi que d’un master recherche de l’UCP en Intelligence Artificielle et Robotique Bio-Inspirée. Il est doctorant à l’Institut des Sciences du Mouvement (AMU/CNRS) et travaille sur la navigation autonome inspirée des insectes.
 Stéphane Viollet est diplômé d’un master recherche en Ingénierie du Contrôle de l’Université de Bordeaux I. Il est titulaire d’un doctorat de l’INP Grenoble. Il est actuellement Directeur de Recherche CNRS au sein de l’équipe de Biorobotique de l’ISM et travaille sur le contrôle visuomoteur chez les insectes et ses applications en biorobotique.
Stéphane Viollet est diplômé d’un master recherche en Ingénierie du Contrôle de l’Université de Bordeaux I. Il est titulaire d’un doctorat de l’INP Grenoble. Il est actuellement Directeur de Recherche CNRS au sein de l’équipe de Biorobotique de l’ISM et travaille sur le contrôle visuomoteur chez les insectes et ses applications en biorobotique.
 Julien Serres est ancien élève de l’ENS Cachan, agrégé de physique appliquée, et diplômé d’un magistère en Electronique, Electrotechnique, et Automatique d’ENS Cachan / Univ. Paris XI. Docteur de l’Université de Montpellier II, il est aujourd’hui Maître de Conférences à AMU où il travaille sur la bio-inspiration des insectes.
Julien Serres est ancien élève de l’ENS Cachan, agrégé de physique appliquée, et diplômé d’un magistère en Electronique, Electrotechnique, et Automatique d’ENS Cachan / Univ. Paris XI. Docteur de l’Université de Montpellier II, il est aujourd’hui Maître de Conférences à AMU où il travaille sur la bio-inspiration des insectes.
Auteurs
Articles du numéro
-
- Revue TELECOM 193 - Avant-propos par Louis-Aimé de Fouquières (1982)Revue TELECOM 193 - Avant-propos par Louis-Aimé de...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - La protection des données personnelles au ministère de l'intérieurRevue TELECOM 193 - La protection des données personnelles...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - L'intelligence artificielle un levier efficace et innovant de la transformation des métiers publicsRevue TELECOM 193 - L'intelligence artificielle un...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Editorial Vers les Bio-Scientists par Michel Cochet (1973)Revue TELECOM 193 - Editorial Vers les Bio-Scientists par...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Les technologies de séquençage Faire face au déluge de données génomiquesRevue TELECOM 193 - Les technologies de séquençage Faire...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - La génomique, un secteur dynamique en évolution constanteRevue TELECOM 193 - La génomique, un secteur dynamique en...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Les technologies numériques démocratisent l'analyse génomiqueRevue TELECOM 193 - Les technologies numériques...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Le "code" extracellulaire Vers une approche thérapeutique au-delà de la thérapie géniqueRevue TELECOM 193 - Le "code" extracellulaire Vers une...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - La microfluidique au service de la santéRevue TELECOM 193 - La microfluidique au service de la santé15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Apports des sciences cognitives et comportementales dans la transformation numériqueRevue TELECOM 193 - Apports des sciences cognitives et...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - De l'impression 3D à la biotech associative, retour d'expérienceRevue TELECOM 193 - De l'impression 3D à la biotech...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Ambitions et projets de IP ParisRevue TELECOM 193 - Ambitions et projets de IP Paris15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Vers l'Internet de l'énergie Télécom ParisTalks du 16 Avril 2019Revue TELECOM 193 - Vers l'Internet de l'énergie Télécom...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Tech Off 2019 Adok, AiZimov et Viznet, les 3 lauréats hébergés dans l'incubateur ParisTech EntrepreneursRevue TELECOM 193 - Tech Off 2019 Adok, AiZimov et Viznet,...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Le Prix des Technologies Numériques 2019 Les FintechRevue TELECOM 193 - Le Prix des Technologies Numériques 2019...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - La transformation digitale (numérique) 2.0Revue TELECOM 193 - La transformation digitale (numérique)...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Télécom Paris accréditée par la CTI pour sa formation d'ingénieur sous statut apprenti sur les deux dernières années du cycleRevue TELECOM 193 - Télécom Paris accréditée par la CTI pour...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Les télécommiens et le futur un point de vue de l'intérieurRevue TELECOM 193 - Les télécommiens et le futur un point de...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Les actualités de la Fondation Merci à tous les donateurs qui ont soutenu Télécom Paris en 2018 !Revue TELECOM 193 - Les actualités de la Fondation Merci à...15 juin 2019Lire la suite >
-
- Revue TELECOM 193 - Une 4è édition du dîner Prestige particulièrement réussieRevue TELECOM 193 - Une 4è édition du dîner Prestige...15 juin 2019Lire la suite >