Le Neurone : le composant électronique principal du système nerveux central, aujourd'hui et demain, avec les Interfaces Cerveau Machine (ICM) 🟢
UN PEU D'HISTOIRE
Pendant les vingt dernières années, le fonctionnement du cerveau ainsi que celui des neurones ont commencé à prendre de plus en plus de place dans les médias, sur les réseaux sociaux et cette place a été belle et bien dominée depuis longtemps par les céphalocentristes (disciples actuels de Hérophile (335-280 av. J.C)). Mais, nous... continuons à « apprendre par coeur » et nous tentons encore de symboliser l'amour tout en essayant de dupliquer sa forme à l'aide des doigts malgré le célèbre questionnement de Shakespeare dans le Marchand de Venise : « Dis-moi où siège l'amour, dans le coeur ou dans la tête ? ».
Les prix Nobel décernés respectivement en 1906 et 1958 à Camillo Golgi et Santiago Ramon y Cajal pour leurs travaux sur la structure physicochimique du neurone et à A.L. Hodking et A.F. Huxley pour leurs travaux sur la définition du circuit électrique équivalent (voir illustration ci-contre) ont été les deux dates clé qui ont révolutionné notre compréhension du fonctionnement du cerveau et du système nerveux. Aujourd'hui, nous savons que le cerveau n'est pas constitué de terre et d'eau comme les cardiocentristes, les disciples d'Aristote (384-322 av. J.C.) le postulaient, mais composé de milliards de neurones (>1010) connectés entre eux (en formant plus de 1013 connexions via les synapses chimiques ou électriques). « Il est la citadelle du corps et le gardien de l'intelligence et de la pensée » (Démocrite (469-399 av. J.C.)).
LE NEURONE : QU'EST-CE QUE C'EST ?
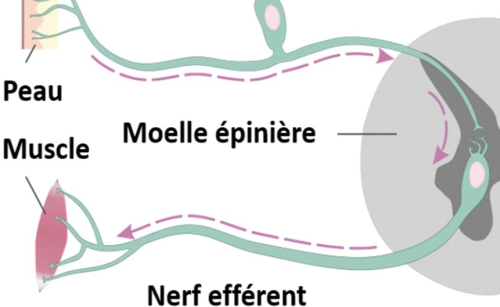
Le neurone, qui peut être considéré comme le composant principal de traitement du signal (d'information) du système nerveux central peut recevoir plus d'un signal (voire des milliers) par ses dendrites qui constituent l'entrée principale du neurone. L'intégration de ces entrées se fait de façon continue au niveau du soma et se traduit en Potentiel Membranaire (PM) qui peut être mesuré in vivo ou in vitro avec un simple oscilloscope. Il est envoyé par la suite à la sortie du neurone, l'axone, un parfait câble de transmission. Le neurone est dit en état de repos (ou passif) si la valeur de son PM ne dépasse pas une valeur spécifique, le seuil. Le signal de sortie suit alors parfaitement la forme du signal résultant de l'intégration et s'annule à la fin de la terminaison axonale ne permettant donc aucun codage de ce dernier. Dans le cas contraire où PM ? seuil (état actif), le PM prend la forme d'un Potentiel d'Action (PA), émis sous forme de trains d'impulsions (spikes), dont la fréquence sera proportionnelle à l'amplitude du PM et atteint la terminaison axonale sans perte d'énergie.
 (A) : Représentation schématique de la boucle du traitement du signal général d’une ICM invasive.
(A) : Représentation schématique de la boucle du traitement du signal général d’une ICM invasive.
(B) : Représentation des boucles du traitement du signal de l’ICM non-invasive développée dans le cadre du projet CIFRE pour le contrôle sensorimoteur des prothèses des mains myoélectriques.
Ce phénomène peut être simulé parfaitement avec un simple circuit électrique qui nous permet d'obtenir un PA (spike) en réponse à un signal carré comme on le voit dans l'illustration page précédente. En cas de synapses chimiques, l'arrivée du PA à la terminaison axonale se traduit en libérant des neurotransmetteurs dans la fente synaptique qui cause à son tour l'empêchement (inhibition) ou le déclenchement (excitation) d'un PA sur les neurones post synaptiques, ce qui permet ainsi un codage en fréquence du PM transmis d'un neurone à l'autre.
Nous sommes donc bien devant une activité électrique du cerveau qui contient les informations codées par les réseaux de neurones, corrélées avec les commandes motrices émises pour contrôler les mouvements du corps et avec les signaux sensoriels qui permettent de percevoir notre corps et son environnement. Cette activité peut être mesurée de façon invasive en implantant dans le cerveau une ou plusieurs électrodes mais également de façon non invasive en utilisant des casques EEG (ElectroEncéphaloGramme).
LES TECHNOLOGIES D'INTERFACE CERVEAU MACHINE (ICM)
Comme le suggèrent de manière conceptuelle les trois lettres de son acronyme, l'ICM (ou BMI : Brain Machine Interface) est composé de trois parties principales (voir illustration ci-dessus [A]) classées de haut en bas dans un ordre un peu différent : CerveauInterfaceMachine (voir illustrations ci-dessus). C'est un ensemble d'outils matériels et logiciels interdépendants qui enregistre l'activité cérébrale, décode cette activité grâce à des algorithmes afin de pouvoir contrôler directement par des signaux corticaux des machines qui sont, soit des dispositifs anthropomorphes (des bras, des prothèses, etc.), soit des dispositifs de tout autre type (interrupteur électrique, fauteuil roulant, tondeuse, etc.). L'ICM peut donc être considéré comme un moyen d'établir une relation directe entre le cerveau et un dispositif, ce qui permet de restaurer par exemple des fonctions motrices perdues lorsque la moelle épinière a été endommagée ou suite à une amputation. L'ICM n'est pas une découverte scientifique en soi, mais le résultat de nombreux autres travaux pionniers dans les domaines des neurosciences, des neurosciences computationnelles, de l'apprentissage artificiel et des techniques informatiques, ainsi que dans le développement de membres artificiels1.
PROGRÈS RÉCENTS
L'année 1999 où il a été montré expérimentalement chez le rat qu'un ensemble des signaux corticaux pouvait être utilisé pour contrôler un levier (Chapin et. al. 1999) peut être considérée comme l'année de naissance de l'ICM. Ce travail a été très rapidement suivi par la présentation de ce principe chez le singe (Velliste et.al. 2008), puis chez les sujets tétraplégiques (Hockberg et. al. 2012), qui leur permettait de contrôler un bras robotique pour se nourrir ou manipuler un objet2. Une classification bien acceptée des ICM les distingue en fonction de la manière dont le signal neuronal est enregistré :
- Non-Invasive : avec des électrodes placées à la surface du crâne (Electroencéphalography, EEG),
- Semi-Invasive : avec une grille d'électrodes implantée de façon sous-durale pour enregistrer les potentiels corticaux (ElectroCorticoGraphy, ECoG),
- Invasive : avec des micro-électrodes insérées dans le cortex du cerveau pour enregistrer les trains des PA ou les potentiels de champ local (LFP) dans une ou plusieurs zones corticales (principalement dans les cortex moteurs et pariétaux).
Tout en offrant le meilleur signal, les deux dernières techniques nécessitent une opération chirurgicale importante et les dispositifs actuels présentent une diminution de la qualité du signal dans le temps provoqué par l'enveloppement des électrodes par les cellules de soutien (Gliales). Par conséquent, bien que souffrant de ses propres limites (principalement celui d'un mauvais rapport signal/bruit et d'une faible résolution spatiale), l'enregistrement non-invasif est répandu dans la recherche, qu'il s'agisse de la recherche comportementale sur la cognition, les diagnostics médicaux ou les traitements par neurofeedback et même de la recherche et des développements pour les jeux vidéo.
NOS RECHERCHES ACTUELLES
Dans un projet CIFRE mené en collaboration avec Ottobock France et l'IRMA (Institut Robert Merle d'Aubigné), nous travaillons sur une version modifiée d'une prothèse myoélectrique (Myobock) afin de fournir un contrôle sensorimoteur basé sur une ICM (voir illustration (B)). Le nouveau système utilise comme entrée les signaux EEG de l'utilisateur ainsi que les vibrations produites par un bracelet composé de moteurs vibrants dont les fréquences sont proportionnelles aux forces mesurées par des capteurs installés aux bouts des doigts de la prothèse. Les résultats préliminaires rapportés4 fournissent une preuve de concept pour l'utilisation d'une ICM sans fil et non-invasive pour contrôler les principaux types de mouvements des prothèses.
PERSPECTIVES ET ENJEUX POUR L'AVENIR
Il est aussi à noter que chaque électrode implantée peut être utilisée à la fois pour enregistrer ou pour stimuler l'activité du neurone ou du groupe de neurones qu'elle touche. L'enthousiasme et la curiosité que suscite ce nouveau domaine de recherche ne sont pas seulement dus au grand nombre d'applications qu'il promettrait, mais aussi sont provoqués par sa capacité de permettre des expérimentations et d'effectuer des études dans le contexte de l'homme augmenté3. Même si les applications médicales sont les plus prometteuses, l'industrie (y compris le militaire), le divertissement, la sécurité, etc., ne se contentent pas d'observer ce domaine ; ils investissent également dans leurs propres recherches.
De plus, plusieurs questions critiques se posent dont les réponses affecteraient la qualité d'un contrôle robuste des prothèses au quotidien. Elles peuvent être ainsi regroupées :
- Enregistrement de l'activité cérébrale : quel type de système EEG serait adapté à cette application ? Quelles régions du cerveau doivent être enregistrées afin d'obtenir les meilleures performances ? Le déclenchement du mouvement pourrait-il être détecté de façon automatique et robuste sur le signal EEG ? Quel est le nombre optimal d'électrodes que nous devrons utiliser pour obtenir un niveau de contrôle satisfaisant ?
- Extraction des caractéristiques et décodage de l'activité cérébrale : vu le grand nombre d'options pour réaliser ces deux fonctions, quelle serait la bonne combinaison des algorithmes concernés ?
- Retour sensoriel : quelle est la contribution du retour sensoriel sur les performances des systèmes ICM ?

Enfin, les résultats des études concernant la communication de cerveau à cerveau chez l'homme, présentés dans (Grau et.al 2014) et discutés dans1, montrent que les questions ne sont pas limitées à celles formulées ci-dessus mais ouvrent ce très jeune domaine de recherche et d'application à d'importantes discussions éthiques et philosophiques.
Le circuit équivalent d'un neurone proposé par Hodgkin & Huxley en 1952 permet d'obtenir en sortie un PA en réponse à un signal carré à l'entrée si PA>seuil. CM : Capacitance Membranaire; RNa, RK, RL représentent respectivement les résistances des canaux sodiques, potassiques et de fuite; ENa, EK, EL représentent respectivement les potentiels d'équilibre des canaux ioniques concernés.
Références
1 S. Eskiizmirliler & J. Goffette. (2015) "Brain-machine interface (BMI) as a tool for understanding human-machine cooperation." in "Inquiring into human enhancement: interdisciplinary and international perspectives", chapter 7, Palgrave Macmillan.
2 M. Tagliabue, Y. Hao, M. Duret, T. Brochier, A. Riehle, M.A. Maier, S. Eskiizmirliler (2015), "Estimation of two-digit grip type and grip force level by frequency decoding of motor cortex activity for a BMI application." Proceedings of International Conference on Advanced Robotics (IEEE, ICAR), 2015, pp. 308-315.
3 https://www.youtube.com/watch?v=gfKwxk3_BPQ
4 C. Piozin, G.H. Altamira, C. Simon, B. Lavrard, J.Y. Audran, F. Waszak, S. Eskiizmirliler, (2022) «Motion prediciton for hte sensorimotor control of hanfd prostheses with a brain-machine interface using EEG», Proceedings of IEE-BCI Winter Conference, accepted for publication.
 T S. ESKIIZMIRLILER
T S. ESKIIZMIRLILERIngénieur en électricité et électronique diplômé de l'Université Middle East Technical University (METU), Ankara, Turquie, a obtenu son doctorat en traitement des signaux et des images à Télécom Paris. Ses recherches post-doctorales qu'il a mené à l'université d'Örebro, en Suède, où il a dirigé le laboratoire des systèmes inspirés de la biologique de 2001 à 2003, ont porté sur la modélisation de la fusion des informations sensori-motrices dans les voies cérébelleuses et sur ses applications au contrôle des membres de robots actionnés par des muscles artificiels. Il est actuellement maître de conférences en neurosciences computationnelles à l'Université de Paris et mène ses activités de recherche à l'INCC (Integrative Neuroscience and Cognition Center). Ses intérêts de recherche actuels concernent les interfaces cerveau-machine et leurs applications médicales, la robotique, les systèmes de contrôle sensori-moteur inspirés de la biologie, les réseaux de neurones artificiels, le traitement numérique du signal et des images.
Auteur
Articles du numéro
-
- La Bioélectronique au service des interfaces neuronalesLa Bioélectronique au service des interfaces neuronales Propos de Stéphanie Lacour recueillis par Michel Cochet (1973) Stéphanie Lacour, merci de bien...24 avril 2022Lire la suite >
-
- Les nouvelles technologies au service de la visionLes nouvelles technologies au service de la vision La vision est liée au fonctionnement de l'oeil, mais aussi à l'activité cérébrale. Pour résoudre...24 avril 2022Lire la suite >
-
- Un Bijou de Technologie à la FrançaiseUn Bijou de Technologie à la Française Dans un contexte où l'insuffisance cardiaque figure comme la première cause de mortalité dans le...24 avril 2022Lire la suite >
-
- Exosquelettes un défi lancé au handicap par la robotiqueExosquelettes un défi lancé au handicap par la robotique En 1495, pour étonner le Duc de Milan, Léonard de Vinci construisit une armure mue de l'intérieur...24 avril 2022Lire la suite >
-
- FollowKnee : La prothèse de demain. Une prothèse de genou connectée, destinée à améliorer le suivi des patientsFollowKnee : La prothèse de demain. Une prothèse de genou... Supérieure à 100% ! Telle est la croissance projetée, pour les prochaines décennies, de...24 avril 2022Lire la suite >
-
- Le retour sensoriel pour les amputés, un symbole d'espoirLe retour sensoriel pour les amputés, un symbole d'espoir Les avancées du domaine révolutionneront les prothèses et la vie de ceux qui les utiliseront.24 avril 2022Lire la suite >
-
- La Main Bionique en Rééducation 🟢La Main Bionique en Rééducation 🟢 Entretien avec Myriam Desbordes Propos recueillis par Michel Cochet (1973) Pouvez-vous rapidement...24 avril 2022Lire la suite >
-
- L'impression 3D au service de l'être humain pour le réparer Synthèse bibliographique faite par Michel Cochet (1973)L'impression 3D au service de l'être humain pour le réparer... Le contexte Depuis son apparition, l'impression 3D, son nom grand public, ou plutôt l'impression...24 avril 2022Lire la suite >
-
- L'Impression 3D un Savoir-Faire Internalisé en Plein Essor aux Hospices Civils de LyonL'Impression 3D un Savoir-Faire Internalisé en Plein Essor... INTRODUCTION Les HCL développent depuis plusieurs années une expertise en matière d'impression 3D en...24 avril 2022Lire la suite >
-
- Le Projet INMOOV : Interview de Gaël Langevin par Michel Cochet (1973)Le Projet INMOOV : Interview de Gaël Langevin par Michel... En 2016, vous aviez contribué à notre revue TELECOM n°180 dont le thème était « l'homme augmenté »....24 avril 2022Lire la suite >
-
- Des Exosquelettes dans le domaine de l'industrieDes Exosquelettes dans le domaine de l'industrie L'exosquelette est un squelette externe dont le rôle est de rétablir une fonction ou de soutenir...24 avril 2022Lire la suite >
-
- Éditorial - Evolving the InternetÉditorial - Evolving the Internet The Internet concepts took shape in 1973, but benefited from earlier work on the Arpanet and...24 avril 2022Lire la suite >
-
- L’internet bas débit !L’internet bas débit ! L’internet des objets (IoT) porte dans sa dénomination un contresens, car il ne s’agit pas de...24 avril 2022Lire la suite >
-
- RINA™ une nouvelle architecture pour un nouvel InternetRINA™ une nouvelle architecture pour un nouvel Internet Depuis 40 ans, internet accueille une multitude de services inimaginables lors de son lancement en...24 avril 2022Lire la suite >
-
- Sur la sécurité cyber et physique des humains dans les futurs réseauxSur la sécurité cyber et physique des humains dans les... La cybersécurité et la sécurité physique des humains seront-elles garanties dans « l’Internet du...24 avril 2022Lire la suite >
-
- Innover sur Internet : quelle place pour l’éthique et la responsabilité ?Innover sur Internet : quelle place pour l’éthique et la... Comment peut-on inventer aujourd’hui une nouvelle infrastructure de communication sur Internet ? Le...24 avril 2022Lire la suite >
-
- Métavers : de la science-fiction au Meta de Mark ZuckerbergMétavers : de la science-fiction au Meta de Mark Zuckerberg Mon avatar dans une salle de cinéma virtuelle de Second Life en 2008 La science-fiction a longtemps...24 avril 2022Lire la suite >
-
- Le Métavers : une vision pour des interactions humaines augmentéesLe Métavers : une vision pour des interactions humaines... Maintenant plus que jamais, nos usages numériques complètent nos intéractions humaines naturelles....24 avril 2022Lire la suite >
-
- Métavers, Avatars & Jumeaux Numériques et Enjeux ÉthiquesMétavers, Avatars & Jumeaux Numériques et Enjeux Éthiques Les technologies d’immersion, réalité virtuelle ou réalité augmentée, ne sont nouvelles, mais créer...24 avril 2022Lire la suite >